报告人: 崔海航 副教授 (西安建筑科技大学)
报告题目:近气液自由面的多模态气泡微机器人
报告时间:5月13日11:00(星期五)
腾讯会议:ID(346726896)
邀 请 人: 孙博华教授 南非科学院院士、力学技术研究院院长和首席科学家
报告人简介
 崔海航,博士,副教授,致公党,西安建筑科技大学,建筑设备科学与工程学院热工流力教学科研中心主任。本科、硕士就读于西安交通大学能源与动力工程学院,博士就读于中国科学院力学研究所非线性力学国家重点实验室(LNM),随后在National University of Singapore做博士后。主要研究方向为微纳尺度流动、计算流体力学、环境流体力学。主持国家自然科学基金青年基金项目、陕西省自然科学基金、高等学校博士学科点专项基金、陕西省教育厅重点实验室项目等纵向项目,参与水体污染控制与治理国家重大专项、国家自然科学基金面上项目等纵向项目,承担其他横向课题十余项。发表学术论文50余篇,其中SCI论文30余篇,包括Lab on Chip、Langmuir、Physical Review E、Physics of fluids、Microfluidics and Nanofluidics、中国科学、科学通报等国内外重要期刊。长期从事流体力学教学工作,负责流体力学省级精品课,主讲流体力学及高等流体力学课程。
崔海航,博士,副教授,致公党,西安建筑科技大学,建筑设备科学与工程学院热工流力教学科研中心主任。本科、硕士就读于西安交通大学能源与动力工程学院,博士就读于中国科学院力学研究所非线性力学国家重点实验室(LNM),随后在National University of Singapore做博士后。主要研究方向为微纳尺度流动、计算流体力学、环境流体力学。主持国家自然科学基金青年基金项目、陕西省自然科学基金、高等学校博士学科点专项基金、陕西省教育厅重点实验室项目等纵向项目,参与水体污染控制与治理国家重大专项、国家自然科学基金面上项目等纵向项目,承担其他横向课题十余项。发表学术论文50余篇,其中SCI论文30余篇,包括Lab on Chip、Langmuir、Physical Review E、Physics of fluids、Microfluidics and Nanofluidics、中国科学、科学通报等国内外重要期刊。长期从事流体力学教学工作,负责流体力学省级精品课,主讲流体力学及高等流体力学课程。
报告摘要
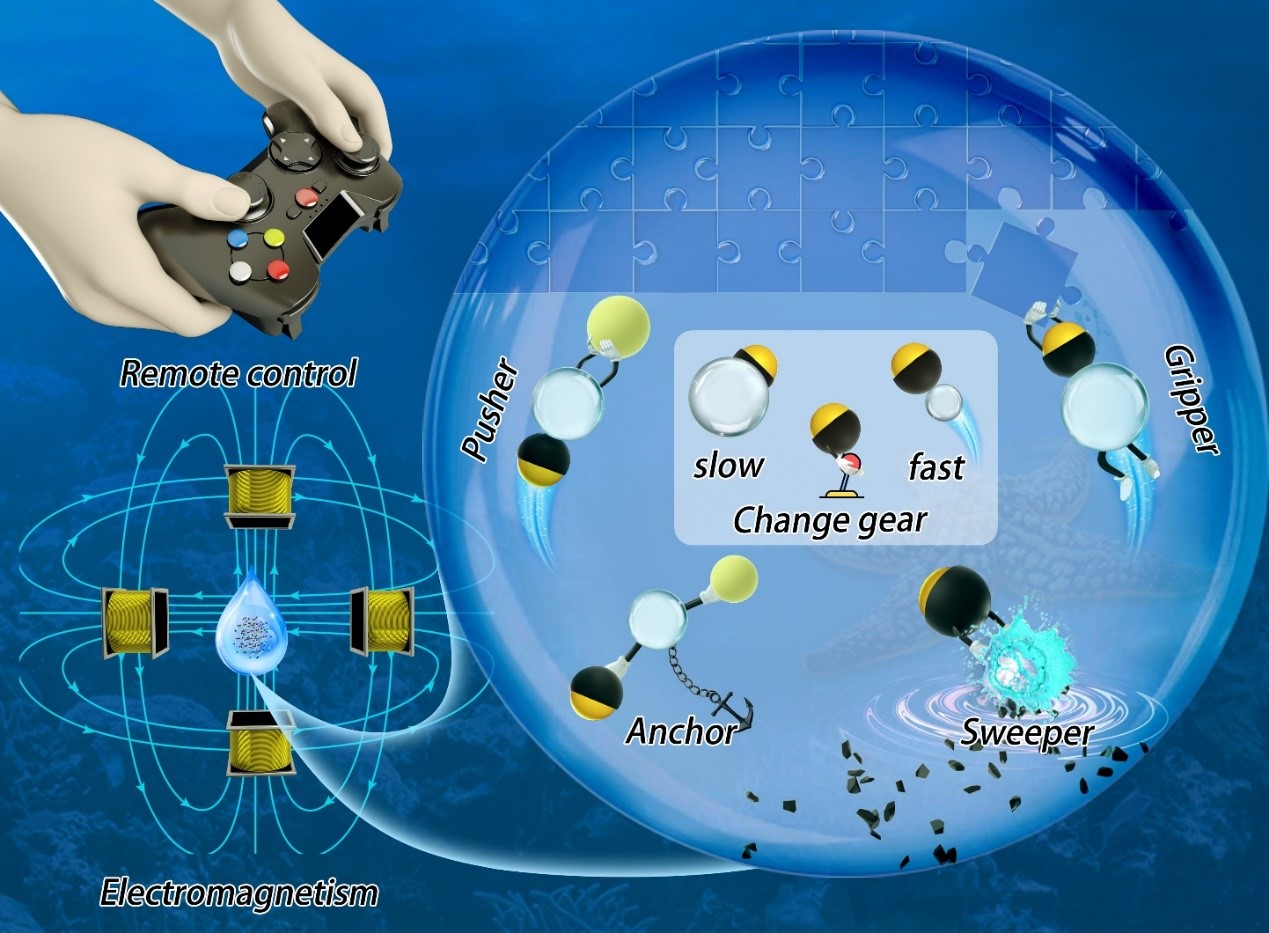
微泳动机器人是宏观世界与微流体环境进行交互的重要手段,迄今已发展了多种不同驱动机制的微泳动机器人,其潜在应用取决于功能的多样性与操控的可靠性,特别是在复杂的微环境中如何精准操控目标物。我们基于气泡驱动的中空Janus型微机器人,发展了气液界面处对目标微颗粒的获取、推动、放置和清扫等功能,优势不仅在于结构简单,而且气泡兼具驱动及“虚拟触手”功能,其物理机制在于近自由液面受限条件下迥异的气泡动力学特性,涉及微射流、表面毛细波以及微气泡-微颗粒的相互作用等力学机制。通过磁引导调整微机器人的运动姿态则使得上述操作更具灵活性,基础操作的组合可以实现更加复杂的功能,在气液界面的微操作、微组装和生物工程中发挥重要作用。
欢迎广大师生聆听报告,参与交流!


 当前位置:
当前位置: